Soft Materials for Soft Actuators
Inspired by living organisms, soft material robotics hold great promise for areas where robots need to contact and interact with humans, such as manufacturing and healthcare. Unlike rigid robots, soft robots can replicate natural motion—grasping and manipulation—to provide medical and other types of assistance, perform delicate tasks, or pick up soft objects.
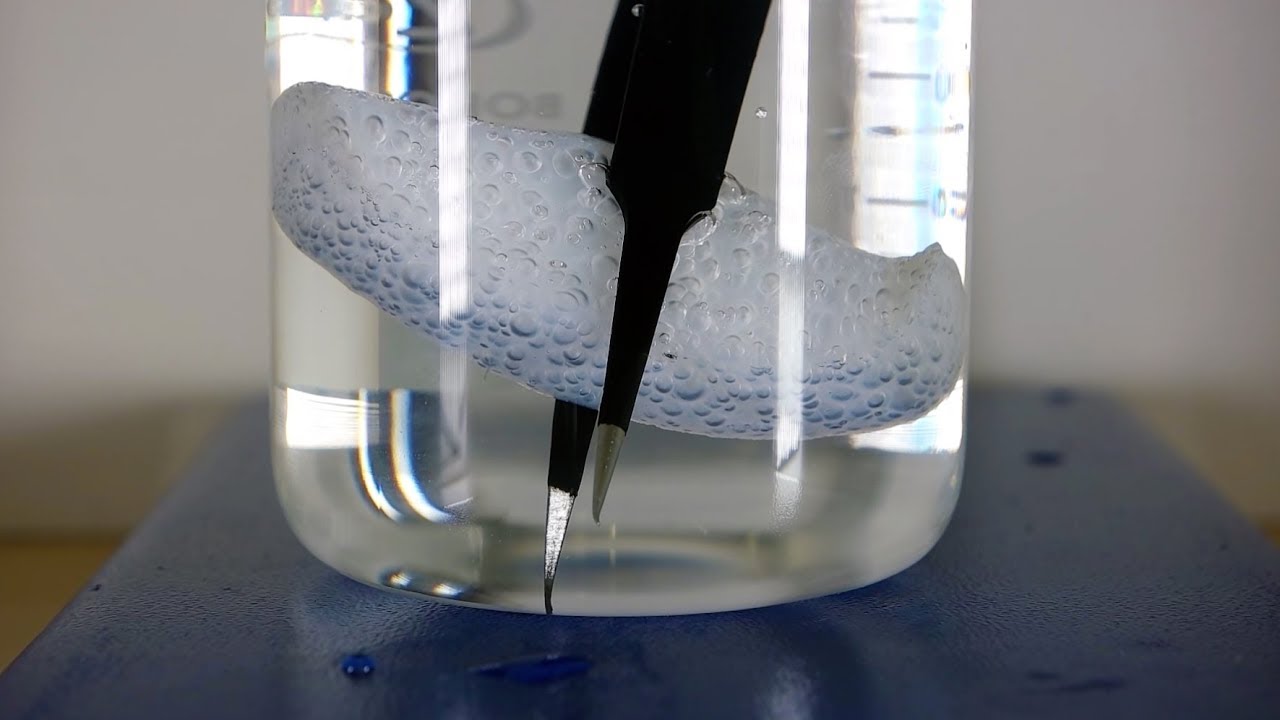
To achieve an actuator with high strain and high stress coupled with low density, lead author of the study Aslan Miriyev, a postdoctoral researcher in the Creative Machines lab, used a silicone rubber matrix with ethanol distributed throughout in micro-bubbles. The solution combined the elastic properties and extreme volume change attributes of other material systems while also being easy to fabricate, low cost, and made of environmentally safe materials.
After being 3D-printed into the desired shape, the artificial muscle was electrically actuated using a thin resistive wire and low-power (8V). It was tested in a variety of robotic applications where it showed significant expansion-contraction ability, being capable of expansion up to 900% when electrically heated to 80°C. Via computer controls, the autonomous unit is capable of performing motion tasks in almost any design.
“Our soft functional material may serve as robust soft muscle, possibly revolutionizing the way that soft robotic solutions are engineered today,” said Miriyev. “It can push, pull, bend, twist, and lift weight. It’s the closest artificial material equivalent we have to a natural muscle.”
The researchers will continue to build on this development, incorporating conductive materials to replace the embedded wire, accelerating the muscle’s response time and increasing its shelf life. Long-term, they will involve artificial intelligence to learn to control the muscle, which may be a last milestone towards replicating natural motion.
About the Study
Journal: Nature Communications
Title: Soft Material for Soft Actuators
Authors: Aslan Miriyev, Kenneth Stack & Hod Lipson
The study was funded by Columbia University and an Israeli Ministry of Defense (IMoD) grant for 3D-printed robotics.
COI: The authors declare no financial or other conflicts of interest.
Columbia Engineering
Columbia Engineering is one of the top engineering schools in the U.S. and one of the oldest in the nation. Based in New York City, the School offers programs to both undergraduate and graduate students who undertake a course of study leading to the bachelor's, master's, or doctoral degree in engineering and applied science. Columbia Engineering’s nine departments offer 16 majors and more than 30 minors in engineering and the liberal arts, including an interdisciplinary minor in entrepreneurship with Columbia Business School. With facilities specifically designed and equipped to meet the laboratory and research needs of faculty and students, Columbia Engineering is home to a broad array of basic and advanced research initiatives, from the Columbia Nano Initiative to the Columbia Genome Center. These interdisciplinary centers in science and engineering, big data, nanoscience, and genomic research are leading the way in their respective fields while our engineers and scientists collaborate across the University to solve theoretical and practical problems in many other significant areas.
Seated Postural and Reaching Control Training with the Trunk Support Trainer (TruST)
“We wanted to scientifically demonstrate how robotic TruST can be used to deliver an intense activity-based postural and reaching training to improve the functional sitting abilities of children with CP and trunk control problems”, says Victor Santamaria, a physical therapist and associate researcher scientist in Agrawal’s Robotics and Rehabilitation Laboratory, and first author of the paper.
Recent developments in robotic equipment have enabled clinicians to address engagement, repetition, and intensity for their patients to practice task-oriented movements in CP. A team led by Agrawal, together with other researchers at Teacher’s College and the Columbia University Irving Medical Center, recently won a five-year National Institutes of Health R01 award (#1R01 HD101903-01) to conduct a randomized clinical trial.
The project—"Improving seated postural control and upper extremity function in bilateral CP with a robotic Trunk-Support-Trainer (TruST)"—will involve up to 80 children with poor trunk control. Some will use the TruST robotic rehabilitation while others will try conventional rehabilitation. This new NIH study will compare the efficacy of the motorized TruST to engage children in play-oriented practice while advancing their skill progression with static trunk support.
“Our new NIH project is a randomized clinical trial with a large sample size to study the efficacy of TruST-intervention as a unique therapeutic solution to promote seated functional abilities in children with bilateral CP,” Agrawal adds.
About the Study
Journal: IEEE Transactions of Neural Systems and Rehabilitation Engineering
Title: Promoting Functional and Independent Sitting in Children with Cerebral Palsy Using the Robotic Trunk Support Trainer
Authors: Victor Santamaria, Moiz Khan, Tatiana Luna, Jiyeon Kang, Joseph Dutkowsky, Andrew Gordon, and Sunil Agrawal, Department of Mechanical Engineering, Columbia Engineering.
The pilot study was partially funded by the Langer Foundation as administered by The Order of Malta.
COI: The authors declare no financial or other conflicts of interest.
Columbia Engineering
Columbia Engineering, based in New York City, is one of the top engineering schools in the U.S. and one of the oldest in the nation. Also known as The Fu Foundation School of Engineering and Applied Science, the School expands knowledge and advances technology through the pioneering research of its more than 220 faculty, while educating undergraduate and graduate students in a collaborative environment to become leaders informed by a firm foundation in engineering. The School’s faculty are at the center of the University’s cross-disciplinary research, contributing to the Data Science Institute, Earth Institute, Zuckerman Mind Brain Behavior Institute, Precision Medicine Initiative, and the Columbia Nano Initiative. Guided by its strategic vision, “Columbia Engineering for Humanity,” the School aims to translate ideas into innovations that foster a sustainable, healthy, secure, connected, and creative humanity.
Header image: Trunk Support Trainer (TruST).
Human-Robot Facial Co-expression

Go inside the Creative Machines Lab to watch Emo's facial co-expression. Video Credit: Yuhang Hu, Columbia Engineering
What’s next
The researchers are now working to integrate verbal communication, using a large language model like ChatGPT into Emo. As robots become more capable of behaving like humans, Lipson is well aware of the ethical considerations associated with this new technology.
“Although this capability heralds a plethora of positive applications, ranging from home assistants to educational aids, it is incumbent upon developers and users to exercise prudence and ethical considerations,” says Lipson, James and Sally Scapa Professor of Innovation in the Department of Mechanical Engineering at Columbia Engineering, co-director of the Makerspace at Columbia, and a member of the Data Science Institute. “But it’s also very exciting -- by advancing robots that can interpret and mimic human expressions accurately, we're moving closer to a future where robots can seamlessly integrate into our daily lives, offering companionship, assistance, and even empathy. Imagine a world where interacting with a robot feels as natural and comfortable as talking to a friend.”
About the Study
Journal: Science Robotics
Title: “Human-Robot Facial Co-expression”
Authors: Yuhang Hu (1); Boyuan Chen (2, 3, 4); Jiong Lin (1); Yunzhe Wang (5); Yingke Wang (5); Cameron Mehlman (1); and Hod Lipson (1, 6)
- Creative Machines Laboratory, Mechanical Engineering Department, Columbia University,
- Mechanical Engineering and Materials Department, Duke University
- Electrical and Computer Engineering Department, Duke University
- Computer Science Department, Duke University
- Computer Science Department, Columbia University
- Data Science Institute, Columbia University
Funding: The study was supported by the National Science Foundation AI Institute for Dynamical Systems (DynamicsAI.org ) grant 2112085, and an Amazon grant through the Columbia Center of AI Technology (CAIT).
COI: The authors declare that they have no competing interests.


Daniela Durón García
